간단한 기계시스템의 모델링
-기계시스템은 병진(translatiomal), 회전(rotational), 또는 두 요소의 조합으로 구성
-기계시스템의 운동을 지배하는 방정식은 보통 뉴턴의 운동법칙으로부터 유도
-스프링 : 유연한 요소 표현 / 댐퍼 : 마찰 표현
병진운동(translational motion)
-직선 혹은 곡선을 따라 일어남
-병진운동을 나타내기 위해서 사용되는 변수들 : 변위(dispacement), 속도(velocity), 가속도(acceleration)
-뉴턴의 운동법칙에 따라 주어진 방향에서 강체 또는 질점에 작용하는 힘의 대수적 합은 물체의 질량과 동일 방향의 가속도의 곱과 같음

1)질량(mass) : 병진운동의 운동에너지를 축적하는 요소

*모델링의 첫 번째 단계는 항상 질량을 분리하고, 그들에 상응하는 반력에 의해 가해지는 모든 부착력의 영향을 나타내는 시스템의 자유-물체 선도(FBD)를 그리는 것
2)선형스프링(linear spring) : 위치에너지를 축적하는 요소

*여기서 K는 스프링 상수 또는 간단히 강성(stiffness)
3)마찰(friction) : 두 물리적 요소 사이에 움직임이 있을 때 존재

*마찰의 종류에는 점성마찰(viscous friction), 정지마찰(static friction), 쿨롱 마찰(coulomb friction), 선형모델을 사용하기 위해 대부분의 마찰 성분은 점성 댐핑(viscous damping)으로 알려진 점성마찰로 근사화
*위 그림과 같이 종종 대시포트(daspot), 댐퍼(damper)로 표현
외팔보(cantilever beam)의 운동방정식
-스프링-질량-댐퍼 시스템으로 모델링

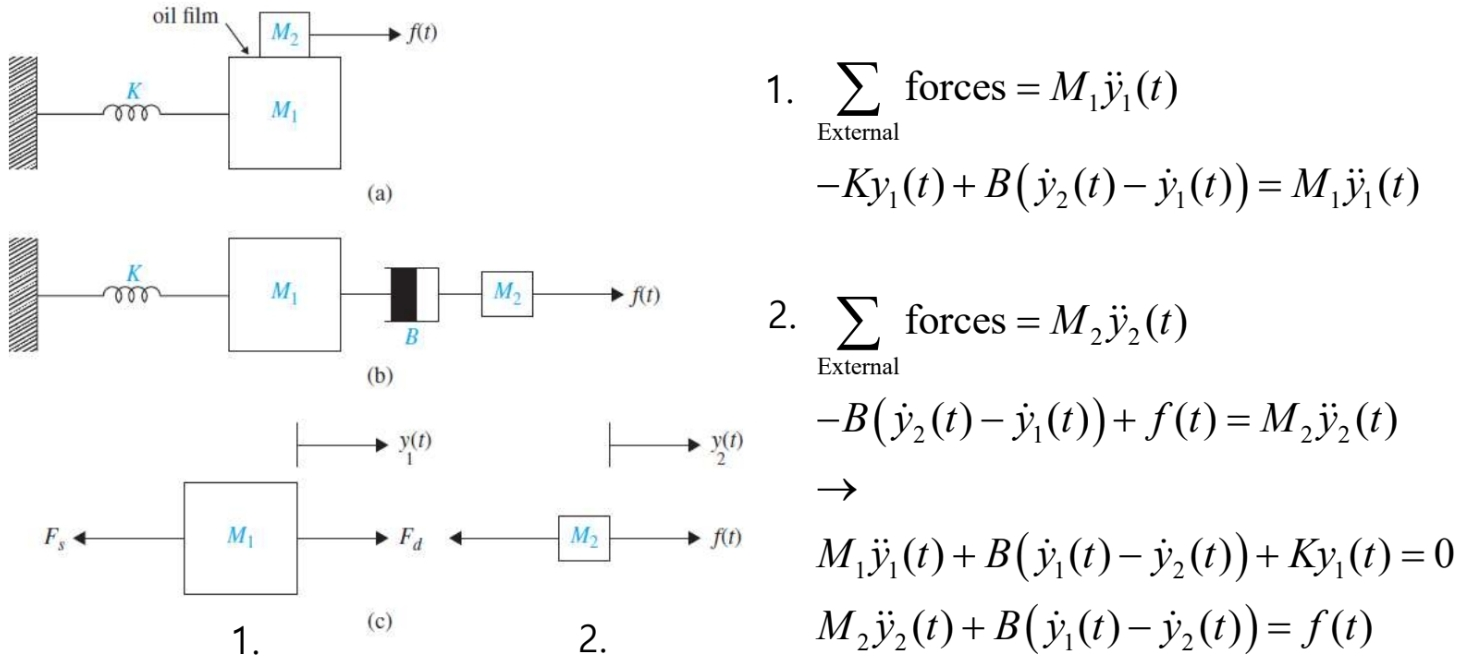
2-자유도 기계시스템
그림의 2차 자유도 기계시스템의 질량 M1은 스프링 K에 의해서 벽에 연결되어 있는 질량 M2의 기름을 칠한 부드러운 표면을 따라 미끄러지듯 움직인다
'이세계에서 시작하는 제어공학' 카테고리의 다른 글
| 2.3장_동적시스템의 모델링(단순한 전기시스템의 모델링) (0) | 2024.01.17 |
|---|---|
| 2.2장_동적시스템의 모델링(회전운동) (0) | 2024.01.17 |
| 1장_제어시스템 소개 (0) | 2024.01.09 |
| 0장_제어공학을 시작하며 (0) | 2024.01.09 |



