제어시스템이란?
원하는 방식으로 에너지, 정보 또는 기타 물리 변수들의 작동을 제어할 목적으로 존재하는 모든 시스템
Ex)달성해야 하는 제어 목표
-온도 혹은 습도유지
-자동차 혹은 비행기의 위치, 속도 및 자세 제어
-사람의 일상 : 의사 결정, 걷기, 물건 줍기, 장애물 피하기, 체온조절, 혈압조절 등
제어시스템의 구성요소
1) 제어 목표
2) 제어시스템
3) 결과 혹은 출력

제어시스템 응용 사례
지능형 교통/운동시스템
-Drive-by-Wire : ABS, 능동현가시스템
-자율보조시스템 : 적응순항제어시스템, 차선이탈경고시스템, 차선유지시스템
-자율주행 자동차
-자율주행 드론
지능형 로봇시스템
-자동화 공작기계
-유연 로봇시스템
-의용생체 로봇 : 수술로봇, 로봇내시경
-두발 로봇 : Boston Robotics Atlas
-군사용 로봇 : 견마 로봇
-우주탐사 로봇 : Mars Perseverance Rover
전기전자시스템
-태양전기판 태양추적시스템
-통신기기의 주파수 및 위상 추적시스템
-전력시스템의 전압과 주파수 제어시스템
군사시스템
-발사체 항법 및 유도제어시스템
-미사일 유도제어시스템
개루프 제어시스템(피드백이 없는 시스템)
open-loop control system
-구성요소 : 제어기(controller)와 제어대상 시스템(controlled process)
-시스템 구성이 경제적이지만 제어성능은 부정확
-제어성능이 크게 문제시 되지 않은 시스템 : 재래식 세탁기, 전동타자기 등

Reference input r : 입력신호 r
Actuating signal u : 작동신호 u
Controlled variable y : 제어변수 y
폐루프 제어시스템(피드백이 제어시스템)
-개루프에 비해 더 많은 장점

피드백(Feedback)과 피드백의 효과
-피드백은 제어시스템의 기준입력(명령)과 시스템의 출력 사이의 오차를 줄이는데 사용
-피드백은 원인과 결과 관계가 존재하는 시스템이면 어디에서나 존재
-시스템 성능지표들에 영향을 미친다(안정성, 대역폭, 전체 이득, 임피던스, 감도 등)

피드백의 효과
1) 이득변경가능
2) 바깥쪽에 피드백을 추가하여, 시스템 안정화 가능
3) 잡음(외란)의 효과를 감소시킬 수 있음

r : 입력신호, y : 출력신호, e : 오차, b : 피드백 신호 / 파라미터 G, H는 상수이득(Constant Gain)으로 간주
1번의 경우
y = Ge , e = r - b, b = Hy
y = G(r - b) = G(r - Hy) = Gr - GHy
y(1+GH) = Gr
y = Gr/(1 + GH) // 만약 GH가 -1이면 시스템은 불안정
우수한 제어시스템 : 파라미터 변화에 둔감하고 입력지시에 민감해야함
제어시스템의 형태
선형과 비선형 제어시스템
-대부분의 물리시스템은 비선형이고 해석하는 일반적 방법 없음
-선형시스템은 해석과 설계에 용의
-비선형시스템을 선형화하여 선형시스템에 대해 제어시스템 설계
시불변과 시변시스템
-제어시스템의 변수들이 동작 중에 일정하게 유지되면 시불변시스템
-시변시스템의 해석과 설계는 선형시불변시스템보다 복잡
연속 시간 제어시스템
-대부분의 물리시스템은 연속시간시스템
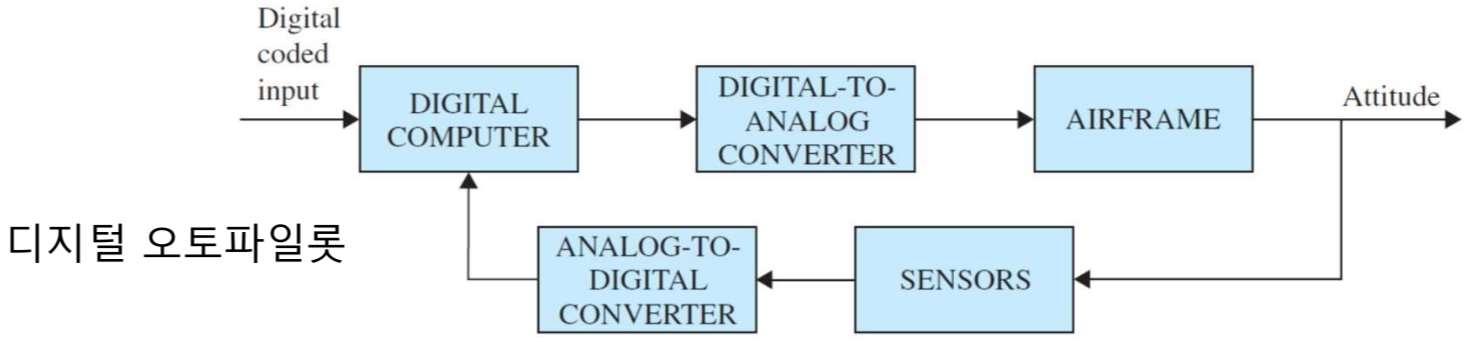
이산시간 제어시스템
-제어시스템의 한 부분에서 신호가 이산신호인 경우
-센서신호를 샘플링하여 이산신호로 바꾼 후 디지털제어기로 제어기능 수행
-디지털기술의 발달로 거의 대부분 이산시간 제어시스템
마무리하며..
-피드백은 제어시스템의 성능을 개선 혹은 악화 시킬 수도 있다
-실제 대부분 물리시스템은 비선형이며 시변 시스템
-디지털기술의 발달로 대부분의 제어시스템은 디지털제어시스템으로 구성
'이세계에서 시작하는 제어공학' 카테고리의 다른 글
| 2.3장_동적시스템의 모델링(단순한 전기시스템의 모델링) (0) | 2024.01.17 |
|---|---|
| 2.2장_동적시스템의 모델링(회전운동) (0) | 2024.01.17 |
| 2.1장_동적시스템의 모델링(병진운동) (0) | 2024.01.17 |
| 0장_제어공학을 시작하며 (0) | 2024.01.09 |



